



五四青年节来啦!《知识就是力量》特别策划“青年科学家趣谈科学”系列内容,我们将从航空航天、生命科学、化学、人工智能、动植物、物理天文等领域挑选青年科学家,一方面带领大家认识中国优秀的青年科学家群体,另一方面,这些青年科学家将带领大家读科学、知科学、爱科学。
提到机器人,
你脑海里是不是这样的:
金属塑料,简单外壳,
看上去“冷冰冰”的。

(图片来源/百度图片)
但随着机器人走出实验室,
应用范围不断扩大,
这类刚性系统在人机交互过程中存在安全隐患。
比如,工业机械臂
撞到工人就很可能导致后者受伤。
如何使坚硬的机器
变得像动物一样柔软和服帖
是研究人员越来越关注的课题。
今天,青年科学家刘建彬
将带我们一起走近
机器人研究的新宠儿——气动人工肌肉!

刘建彬 2012年毕业于浙江大学机械电子工程专业,获工学学士学位;2017年12月毕业于浙江大学流体动力与机电系统国家重点实验室,获工学博士学位,师从杨华勇院士。2018年6月至今在天津大学机械工程学院任教。主要从事流体动力与控制、液压系统优化设计及柔性外骨骼等的科研和教学工作。先后取得了日内瓦国际发明展金奖、上银优秀机械博士论文银奖以及入选第四届中国科协青年人才托举工程等代表性成果,参与863重点项目2项,作为负责人承担科研项目两项,发表和录用SCI检索论文7篇,EI检索论文1篇,授权发明专利9项,在申发明专利5项。
机器人研究的新宠儿——气动人工肌肉
撰文/刘建彬
近年来,机器人技术在全球范围内得到了长足的发展,机器人既是先进制造业的关键支撑装备,也是改善人类生活方式的重要切入点。无论是在制造环境下应用的工业机器人,还是在非制造环境下应用的服务机器人,其研发及产业化应用是衡量一个国家科技创新、高端制造发展水平的重要标志[1]。
人工肌肉是一种将其他形式能量转化为拉力的机器人执行器,研究和应用中以气压驱动最为常见,因其具有类似人类肌肉的输出特性而得名。气动人工肌肉因其功率重量比高、具备柔性、无机械摩擦磨损、安装简易、驱动介质易获取且无污染、可靠性好以及制造成本较低等优点而广泛应用于工业机器人和服务机器人领域。其中,人工肌肉在康复医疗机器人领域已经成为应用最为广泛的执行器,其性能好坏和可靠性高低直接决定了康复医疗机器人的技术水平和应用前景。人工肌肉自上世纪五十年代被提出后已经吸引了国内外大量的研究者和产业界的目光,成为机器人领域一个研究的热点问题。
传统人工肌肉以Mckibben型为代表(图1),该肌肉由物理学家Joseph L. Mckibben发明并因此得名,由内层的橡胶套筒和外层包裹的纤维编织网组成,肌肉两端封闭,一端一般作为进出口用于充放气,另一端连接负载。该肌肉充气时,整体体积变大,内层橡胶套筒直径增大,编织网中的纤维与中心轴线角度产生变化,而由于纤维不可伸长,使得肌肉长度缩短,从而使肌肉产生较大的收缩拉力,该肌肉的优点为收缩力大,缺点为受制于整体膨胀体积有限,收缩行程较小,且该肌肉的收缩力必须通过径向膨胀产生,导致机器人需为其预留膨胀空间,应用受限。
图1 Mckibben型气动人工肌肉[2]
哈佛大学Lee Belding等人为改进传统Mckibben型人工肌肉行程较短的缺陷还提出了一种基于狭缝管的新型气动肌肉[3]。如图2所示,该肌肉的主体为一个由难拉伸材料制成的圆管,圆管中部布置有多道轴向狭缝,管内有可膨胀气囊,当向气囊内充气时,气囊带动圆管中部膨胀,由于圆管材料不可拉伸,此膨胀将导致圆管整体长度缩短。由于膨胀体积较大,此种类型相比传统Mckibben型气动人工肌肉具有更大的收缩行程。

图2 哈佛大学提出的基于狭缝管的新型气动人工肌肉[3]
此外,为了克服Mckibben型人工肌肉作动行程较小的问题,香港大学Juan Yi等研究者提出了一种基于折展容腔的新型气动人工肌肉[4]。如图3所示,该研究中将原Mckibben型人工肌肉的中空圆柱形橡胶容腔改为基于折展原理的新型折展容腔,该容腔在充气过程中可产生更大的径向膨胀,且充气后其本身即可产生轴向收缩,再配合与传统Mckibben型人工肌肉相同的外层纤维编织网,其收缩行程更大且收缩所需气压更低。
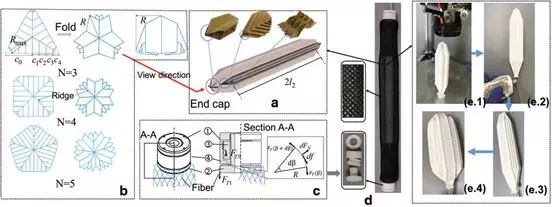
图3 香港大学研制的折纸容腔型气动人工肌肉结构示意[4]
除了对传统Mckibben型气动人工肌肉的研究外,基于相似原理而提出的新型气动人工肌肉研究层出不穷。卡耐基梅隆大学Jackson Wirekoh等人致力于一种基于气囊膨胀和纤维加强的扁平型气动人工肌肉[5, 6],与Mckibben型相比,如图4所示,该肌肉为扁平形态,其内部被分割成若干气囊,充气时气囊带动其两侧加强纤维膨胀,纤维不可拉伸,从而产生肌肉收缩。此种气动人工肌肉由于其扁平形状而具有更强的可穿戴性,其制造方法为硅胶注模,加工工艺简单。
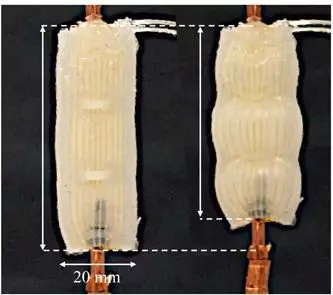
图4 卡耐基梅隆大学研制的扁平型气动人工肌肉[5]
此外,韩国中央大学Kwanghyun Han等人还提出了一种大行程的新型气动人工肌肉,该肌肉兼具大行程和强负载力的特点,与传统Mckibben型气动人工肌肉相比,该肌肉收缩比增加了183%,负载力增加了37.1%[7]。如图5所示,该肌肉具有简洁可靠的结构,主要构件有中部的模块化气囊和两条不可拉伸的带状结构,当气囊充气时膨胀伸长,自然带动两条带状结构产生垂直于气囊方向的缩短。与传统气动人工肌肉相比,该结构相对较为扁平。且由于其气囊腔室结构的设计,其气囊膨胀产生于折叠结构的伸展变形而非材料的弹性变形,故充气式气囊径向方向不产生膨胀,肌肉厚度不变,可穿戴性具有明显提升(图5a)。
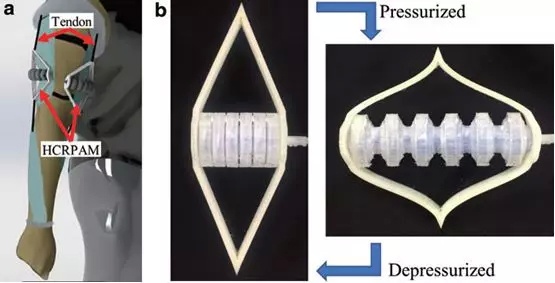
图5 韩国中央大学研制的新型可穿戴气动人工肌肉
笔者在深入调研基础上,提出了一种新型模块化气动人工肌肉方案如图6所示,人工肌肉内部气路结构截面图如图7所示。为图示简洁明了起见,图7中只绘制了四个模块化的驱动单元(薄膜气缸)。如图7所示,新型模块化气动人工肌肉主要由模块化的薄膜气缸及内有气路的拉动带(拉动带截面为矩形,气路截面为圆形)组成。薄膜气缸的三维模型如图6左下所示。拉动带内部环形气路与气动肌肉的充气嘴相连,且拉动带内部气路与每个薄膜气缸内部的腔体连通,当通过气嘴向气动肌肉充入高压气体时,拉动带内部气路和每个薄膜气缸内部的碗形腔体内部气压升高,腔体膨胀,薄膜和气缸杆(如图7标示)在高压气体作用下伸出。由于所用材料不可拉伸,每个薄膜气缸的伸长量将被转化为肌肉长度方向的的收缩,如图7右侧所示。
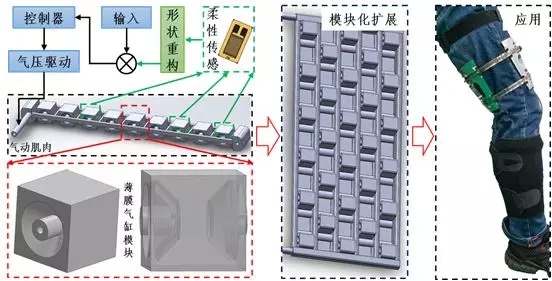
图6 新型模块化气动人工肌肉方案概念图
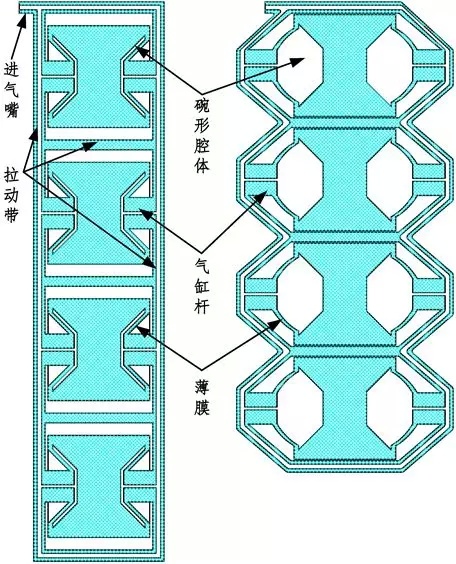
图7 新型模块化气动人工肌肉截面示意图
对于新型气动人工肌肉驱动形式的探索在未来很长一段时间内仍会吸引无数科学家和工程师的目光,该领域也将持续成为机器人研究领域的前沿之一,希望对此感兴趣的青少年读者朋友能够学好数学、物理等基础理论知识,关注相关科技发展动态,将来投身于气动人工肌肉及相关领域的研究中去,为祖国机器人产业发展添砖加瓦。
参考文献:
[1] 工业和信息化部, 国家发展改革委员会, 财政部. 机器人产业发展规划(2016-2020年)[M]. 北京: 2016.
[2] Doumit M, Leclair J. Development and testing of stiffness model for pneumatic artificial muscle[J]. International Journal of Mechanical Sciences, 2017,120:30-41.
[3] Belding L, Baytekin B, Baytekin H T, et al. Slit Tubes for Semisoft Pneumatic Actuators[J]. Advanced Materials, 2018,30(9):1704446.
[4] Yi J, Chen X, Song C, et al. Fiber-Reinforced Origamic Robotic Actuator[J]. Soft Robotics, 2018,5(1):81-92.
[5] Wirekoh J, Park Y. Design of flat pneumatic artificial muscles[J]. Smart Materials and Structures, 2017,26(3):35009.
[6] Park Y, Santos J, Galloway K G, et al. A soft wearable robotic device for active knee motions using flat pneumatic artificial muscles[C]//: 2014 IEEE International Conference on Robotics and Automation (ICRA), 2014. IEEE.
[7] Han K, Kim N, Shin D. A Novel Soft Pneumatic Artificial Muscle with High-Contraction Ratio[J]. Soft Robotics, 2018,5(5):554-566.
今天,青年科学家刘建彬为我们带来的“人工肌肉”的内容你都了解了吗?如果你有更多关于“机器人”的思考,欢迎留言区互动哟!
另外,《知识就是力量》杂志社联合网易新闻发起“点赞青年科学家”的活动,欢迎登陆“网易新闻”手机客户端,查看关于本次活动的更多精彩内容。