
如果自动驾驶真的来了,那么还需不需要考驾照呢?汽车上路又需要哪些认证呢?
这其实是一个比较专业的问题。如果汽车真能实现L5级自动驾驶,那么驾驶的主体是车,而不是人。所以,与目前人为驾驶的情况不同,未来自动驾驶时代需要考驾照的则可能是汽车。

路测也需要持“证”
自动驾驶汽车测试场景分为T1至T5五个级别,不同车辆可选择不同的测试场景。其中,T1为最基础的笔直道路,只有红绿灯等简单交通设置;T2为简单城市场景,可让自动驾驶车辆实现右转;T3为常见城市场景,有城市平面立交桥;T4为复杂城市场景,有隧道、林荫道等设置;T5为特殊城市场景,可实现雨雾、湿滑路面等复杂交通和天气环境。
测试车辆在基地完成测试之后,基地会出具相应的技术能力测评报告,作为申请牌照的必要条件。另外,所有车辆还需要在场地内完成5000公里以上的测试,进一步巩固车辆系统的稳定性。
在测试过程中,驾驶室内都要求坐着1至2名驾驶人员,在车辆行驶的过程中,他们并不需要做任何操作,只需要随时查看车辆的运行状况即可,只有在车况不稳定或者出现特殊情况的时候,才会介入操作。
据了解,测试驾驶员须通过不少于50小时的培训和训练,能够随时接管自动驾驶车辆。上路前,须通过专家的评估论证;上路后,测试车辆要安装监管设施并上传数据,以确保自动驾驶车辆按规定时间、规定路段进行试验,并随时接受监督。
自动驾驶路测考试机制怎么来的?
自动驾驶路测考试机制并不是随机设定的,它需要体现权威性、可靠性。靠标准化的考试项目区筛选出真正有实力的自动驾驶企业,并不是那么容易的,那么这套标准从哪里来呢?
据了解,结合工业和信息化部、公安部、交通运输部等三部委共同发布的《智能网联汽车道路测试管理规范(试行)》,考试项目设置可以包含以下几个方面:
一是基本交通管理设施检测与响应能力测试,测试内容应包含《GB5768 道路交通标志和标线》、《GB14887 道路交通信号灯》、《GB14886 道路交通信号灯设置与安装规范》等标准要求的道路交通设施种类和安装规范等内容;
二是前方车道内动静态目标(机动车、非机动车、行人、障碍物等)识别与响应能力测试,测试内容应包含感知识别不同目标(非机动车、行人、障碍物)的类型和状态、跟随不同交通参与者(机动车、非机动车、行人)行驶、车速车距控制等内容;
三是遵守规则行车能力测试,测试内容应包含超车、并道、通过交叉口等内容;
四是安全接管与应急制动能力测试,测试内容应包含靠边停车与起步、应急车道内停车、人工接管等内容;
五是综合能力测试,综合考察自动驾驶汽车对交通语言认知能力、安全文明驾驶能力、复杂环境通行能力、多参与对象协同行驶能力、网联通讯能力等内容。
自动驾驶公共路测面临的挑战有哪些?
就目前来看,自动驾驶汽车测试方法主要包括软件在环(SIL)、硬件在环(HIL)、车辆在环(VIL)等方法;测试内容主要包括传感器、执行器、算法、人机界面测试以及封闭场地、公共道路测试等内容;测试目的是从功能、性能、安全、稳定等方面来验证自动驾驶系统的合理性、安全及可靠性。
使用这些方法路测,得到的数据主要来源于设定的环境。如果开展公共道路测试,自动驾驶汽车将面临哪些挑战呢?
一是复杂道路环境带来的挑战,我国道路环境和交通构成相对复杂、机动车驾驶人驾驶行为多样化,自动驾驶汽车如何正确识别并做出准确响应是面临的挑战之一;
二是自动驾驶汽车和人工驾驶汽车混行带来的挑战,自动驾驶汽车如何正确感知其他车辆,正确识别外界声光信号,及时向外界发出声光信号,实现与人工驾驶汽车的有效协同并行,也是面临的挑战之一。
自动驾驶汽车测试场景构建有哪些架构和维度?
自动驾驶汽车测试场景架构的确定是构建自动驾驶测试场景的前提。从测试场景层次架构角度来讲,包括道路拓扑结构(像障碍物、车道线等)、交通流以及动态情景等三部分。从测试场景三维架构角度来讲,测试场景是行驶场地和驾驶情景的组合,在环境的影响下,由不同场景(高速公路、乡村道路、城市道路等)与驾驶任务、驾驶模式、驾驶速度等一同构成。
针对传统测试场景构建方法存在的效率低、适应差、规划程度弱等问题,可以从以下维度出发,构建符合我国典型道路交通情景的测试场景:
一是借鉴我国机动车驾驶人考试制度与方法、道路交通通行原则与法律法规在实施过程中的成功经验,从安全驾驶技能、安全驾驶意识等角度构建基于机动车驾驶人考试的测试场景;
二是结合重特大道路交通事故深度调查,以及对我国典型道路交通违法行为深入分析,从道路交通法律法规、事故和违法行为诱因、交通参与类型等角度,构建基于交通事故与违法情景的测试场景;
三是基于我国典型道路环境、道路类型、典型交通流、典型天气及光照等条件,通过道路设计、交通流仿真分析、实际道路交通场景采集分析等方法,构建基于道路交通情景的测试场景。
自动驾驶汽车安全可分为主动安全、功能安全、预期功能安全和信息安全。其中,功能安全主要关注由于系统、硬件或软件失效而导致的危害;预期功能安全则主要关注系统部件无故障情况下,由于感知或系统执行不符合预期而产生的危害。
不符合预期情况产生的主要原因有以下几方面:
一是道路条件、周边事物、环境天气等诸多因素会对自动驾驶系统产生干扰,导致系统不能准确可靠地开展环境识别、驾驶决策及运动控制;
二是目标使用场景考虑不周全,导致系统不能准确识别环境要素;
三是功能决策逻辑不合理,导致系统决策失误;
四是 V2X 预警交互信息传输不准确,导致自动驾驶汽车交互通信错误;五是执行器响应能力不足,导致运动控制偏离预期。
颁发109张自动驾驶牌照,百度最多
相比国外,国内路测牌照发放比较保守,早在2012年5月,美国内华达州就为谷歌的无人驾驶汽车即后来的Waymo颁发了美国首张自动驾驶路测牌照。但在国内,2018年3月,国内首张自动驾驶路测牌照发出。
根据中国汽车工业信息网统计,截至今年4月份,国内已颁发109张自动驾驶路测牌照,共涉及16个城市。其中北京颁发数量最多且远超其他城市,为59张,其次是重庆,数量为12张,江苏省则有三个城市颁发了自动驾驶牌照,分别为常州、无锡、苏州。
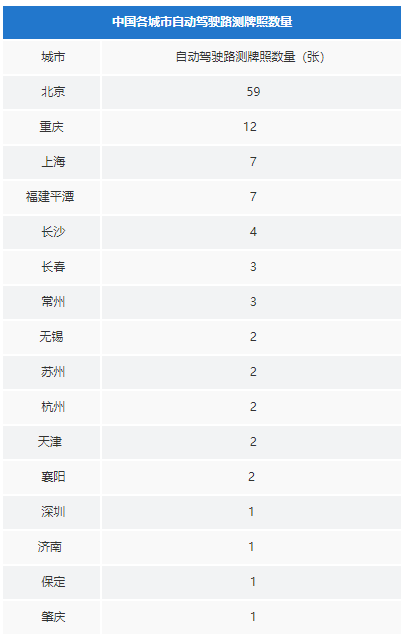
图片来源:太平洋汽车网
汽车企业获得牌照的主要有上汽、蔚来汽车、一汽、东风、长安、广汽、吉利、PSA、宝马、奔驰、奥迪中国等。109张自动驾驶牌照中有92张为乘用车牌照,17张为商用车牌照。
路测里程现状
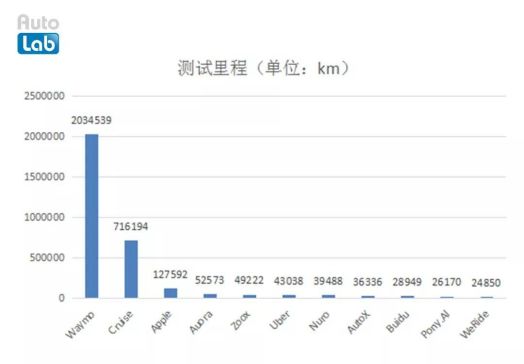
获得了路测牌照与真正路测里程之间并没有太大关系。据北京路测数据显示,在整个2018年度,共完成153565km的试验里程。其中,百度以超13万公里的总测试里程,斩获第一。

数据来源:网络
不过由于此份报告仅有北京自动驾驶路试数据,上海、重庆、深圳等地并未发布报告,而蔚来、上汽等主战场在上海,腾讯、广汽的主战场在深圳,因此就全国范围而言,其他公司的差距会略有缩小,但并不影响百度的一家独大地位。
目前,报告中提到的15万公里的自动驾驶测试中,未出现一起事故。
和加州报告相比,北京测试的总里程比较少。但两个报告最大的不同,是其并未公开MPI(Miles Per Disengagement,自动驾驶汽车每次干预能够自主行驶的里程数)。
数据来源:网络
尽管MPI被认为是企业内部衡量研发迭代的重要技术指标,但由于车辆、路况、场景复杂度不同,具体操作和上报标准不一致,并不适合作为企业间横向比较排名的指标。北京市将不对各企业的MPI进行比较,避免企业弄虚作假,玩数字游戏。
当然,数据量差距大并不能说明中国落后美国很多,这个账面差距主要来自两方面原因。首先,发展时间不同,加州自2015年便放开自动驾驶在开放道路测试,北京2017年才开始立法,2018年也只是自动驾驶开放道路测试的第一个年头。
其次是中美政府对自动驾驶开放道路测试的策略不同,总体而言,加州较为激进,只需满足DMV对技术和公司资质上的要求,并承诺定期向DMV提交测试数据,便可上路。相对而言,北京交通委谨慎很多,自动驾驶公司在申请开放道路试验之前,须在封闭道路内经过严格的测试,考核达到一定要求后,才能在开放道路测试。
可以看到,北京报告更侧重于引导自动驾驶企业在规模化能力、安全测试能力以及场景适应能力。
写在最后
路测牌照,对于自动驾驶企业而言,只是一张入门许可证,但也非常重要。没有这张“证”,后续便无法基于更完善的场景测试自动驾驶汽车的性能,没有多项路测里程数据背书,则无法获得消费者及国家部门的认可,商用之路基本就无法走下去了。
对于自动驾驶汽车而言,跑的远、跑的场景多,还是能反应很多问题的,比如安全性、可靠性等。目前,自动驾驶技术尚未成熟,但通过不断的路测实验,可以及时发现问题,处理问题,从技术层面提升汽车的安全性及可靠性,更快推动自动驾驶技术的进步与发展。
本文部分资料来源:北京晚报、智车科技、车云网、智驾未来等




据了解,CiDi于2017年10月正式注册成立,由香港科技大学著名创业导师李泽湘教授领衔创办,以智能驾驶科技创新及应用为导向,致力于城际物流重卡的智能驾驶核心技术和创新产品的研发。希迪智驾使用了百度Apollo的开源算法,并为Apollo贡献了2万多行的开源代码,希迪智驾也和Apollo合作开发了相对地图,可以和高精度地图以及视觉感知进行联动,希迪智驾的出现也填补了Apollo在重卡货运领域上的空白。
2019年6月15日全国“车联网+地理信息”产业高端研讨会在德清召开,会上表明德清将打造浙江首个全域城市级自动驾驶与智慧出行示范区,希迪智驾成为首批获颁德清智能网联汽车开放道路测试牌照的企业之一。
2.