

仿生机器鱼(bio-mimetic robot fish)又名机械鱼,人工鱼或鱼形机器人),顾名思义即参照鱼类游动的推进机理利用机械电子元器件或智能材料(smart material)来实现水下推进的一种运动装置。鱼类是最早的脊椎动物之一,经过长期的自然选择进化出非凡的水下运动能力,鱼类的运动具有高效、高机动、低噪声等特点。国外学者很早就致力于对鱼类推进模式及仿生机器鱼的研究。

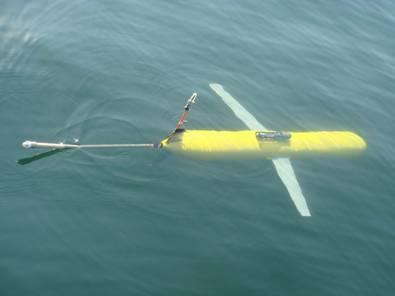
对鱼类的形态、结构、功能、工作原理及控制机制等进行模仿、再造,能提高水下机器人的推进效率和速度,使水下机器人更适合在狭窄、复杂和动态的水下环境中进行监测、搜索、勘探、救援等作业。1994年MIT研究组成功研制了世界上第一条真正意义上的仿生金枪鱼。(如上图)该阶段机器鱼主要采用 BCF 推进模型,研究人员致力于如何提高推进效率以及提高机器鱼的运动灵活性。此后,结合仿生学、机械学、电子学、材料学和自动控制的新发展,仿生机器鱼的研制渐成热点。
大部分鱼类的推进方式分为身体尾鳍(body and/or caudal fin,BCF)推进模式和中间鳍对鳍(median and/or paired fin,MPF)推进模式两种。其中,采用BCF模式游动的鱼类,主要通过身体的波动和尾鳍的摆动产生推进力,其瞬时游动的加速性能好,周期游动的巡航能力强;采用MPF模式的鱼类,主要依靠胸鳍或腹鳍的摆动产生推进力,其机动性能好。如 2010 年新加坡南洋理工大学研制的“RoMan-II”仿生蝠鲼试验样机,身体两侧平均分布有 6 个柔性鳍条,通过鳍条的拍动产生推进力,可实现各个方向的机动性,该样机可完成。
近年来,随着仿生材料、柔性材料的出现,采用柔性驱动成为了水下仿生机器人的一个研究热点。如 2011 年,弗吉尼亚大学研制的仿生蝠鲼,质量为 55.3 g。该仿生蝠鲼的鳍条采用人工肌肉产生驱动力,通过水池游动试验测定其速度可达 0.4 cm/s 。此外,哈佛大学也进行了柔性驱动的相关研究,并研制了利用柔性胸鳍进行推动的水下机器鱼。