
前言——激光雷达(LiDAR,英文“Light Detection and Ranging“的缩写)起源于上世纪60年代。1971年阿波罗15号任务期间,被用于月球表面绘制工作,光学雷达首次进入公众视野。在近半个世纪内不断发展,被广泛应用于测绘、无人机、安防等行业。
优势●
激光雷达是通过主动发射激光束及接受信号实现测探测功能的高精度传感器,其利用光学原理(光的传播速度很快)而实现的高效探测使得激光雷达在测距精度,响应速度及测距稳定性等方面都存在一定的优势。
劣势●
无论光学、声学还是电学,都存在技术本身的劣势。由于采用可见光或近红外外作为探测媒介,光在传播过程中易受到悬浮在空气中的粉尘或水滴的影响,因此激光雷达在雨雪雾霾天、沙尘暴等恶劣天气中表现欠佳。
针对此种情况,多次回波技术可以对激光雷达的数据进行修正,在雨雾等恶劣天气下也能保持较稳定的探测性能。
一、多次回波探测(Multi Echo)定义
激光脉冲在传播过程中遇到距激光发射源不同距离的障碍物时会发生多次反射,只要回波信号的强度足以被接受并且回波信号的间距满足一定的条件,就可以被记录并获得该次反射所测得的距离。
一束激光脉冲在传播过程中被多次反射,每次反射距离不同,光敏系统按一定时间间隔接收并解析到从不同距离反射回来的激光脉冲,这样就可以利用一束激光测得两次以上的距离值。

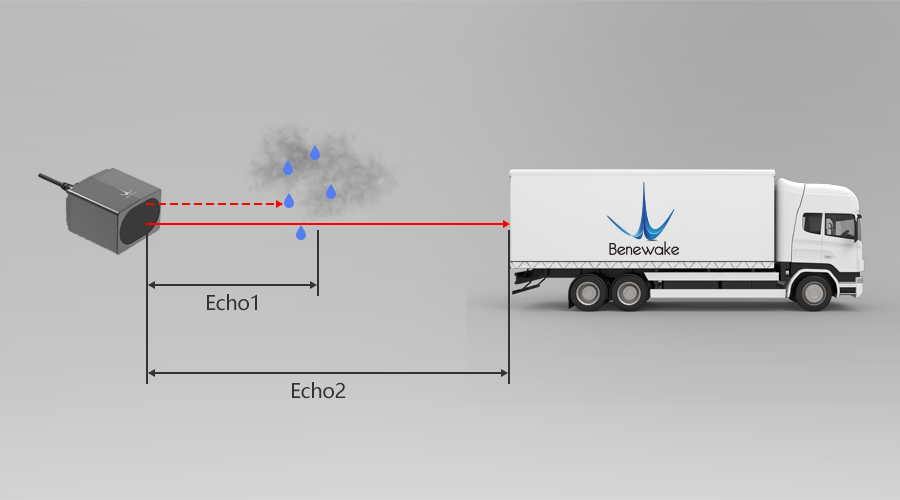
图1 多次回波测量示意图
假设雨雾和被测车辆之间的距离为L,雨雾回波信号Echo1的脉宽为Δt,只有当雨雾与被测车辆之前的间距S>V光速×Δt/2时,雨雾和车辆的回波信号Echo1和Echo2才能被区分开,雷达能测到两个目标,通过算法处理,得到被测车辆的准确距离。另外距离越近,雨雾的回波信号Echo1越强,因此一般雨雾只会形成一次可以探测到的回波信号,并非雨雾环境下全程都有回波信号。
现实生活中,绝大多数常规场景下,主要产生的为二次回波,三、四回波的情况相对较少,五次及以上的回波出现的概率近乎为零。在一些特殊场景中,如森林地区、庄稼地、草原等,多次回波出现的频率会大大增加。综合来看,激光雷达中使用的多为二次回波技术来实现雨雾穿透。
二、北醒TF03激光雷达结合雨雾算法效果展示
图2 多次回波测试场景
搭建简易测试场景对多次回波技术的效果进行验证,实验中使用三角架支撑TF03激光雷达,在降雨量较大时对应开启/关闭多次回波测量结果见如下对比图:
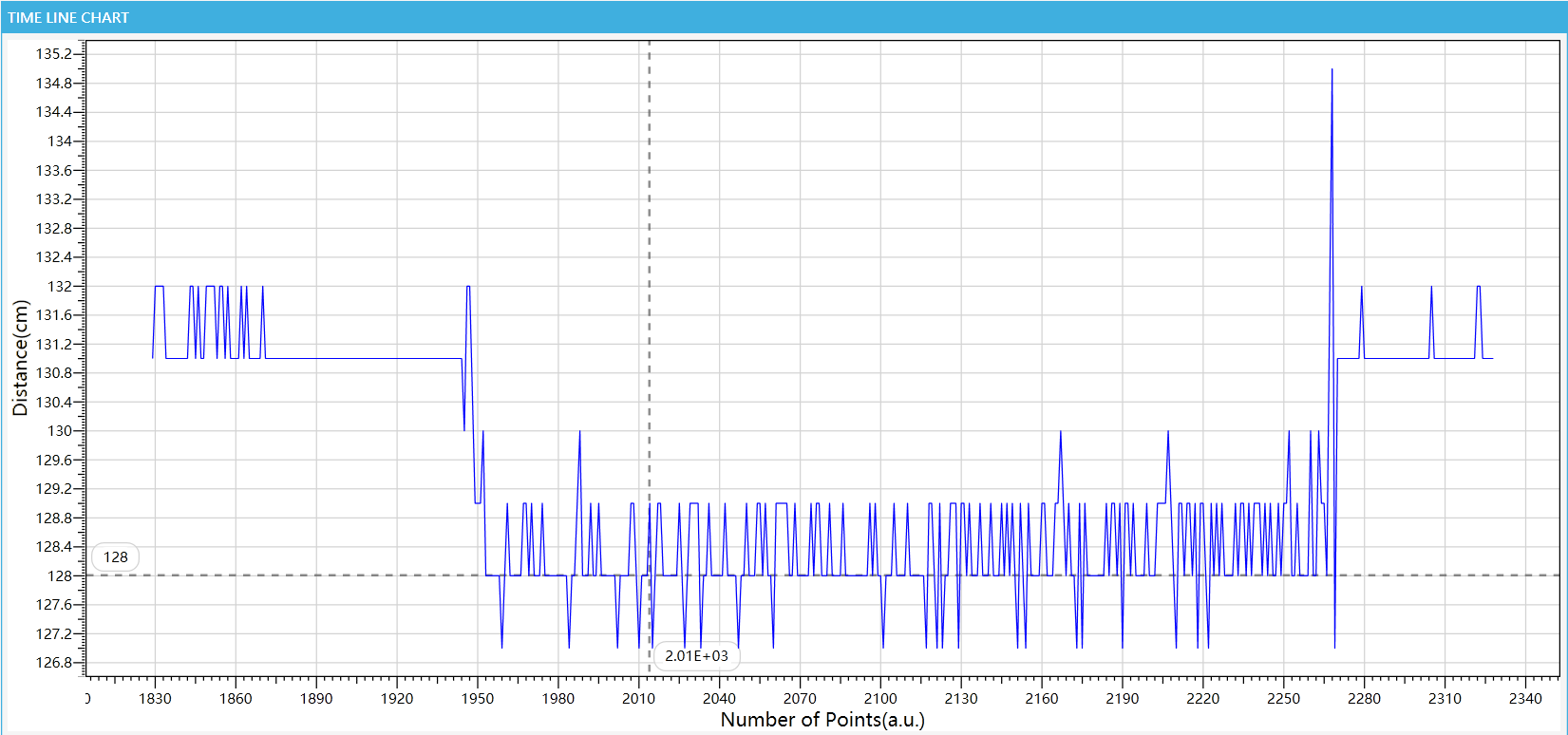
图3 使用多次回波测试效果
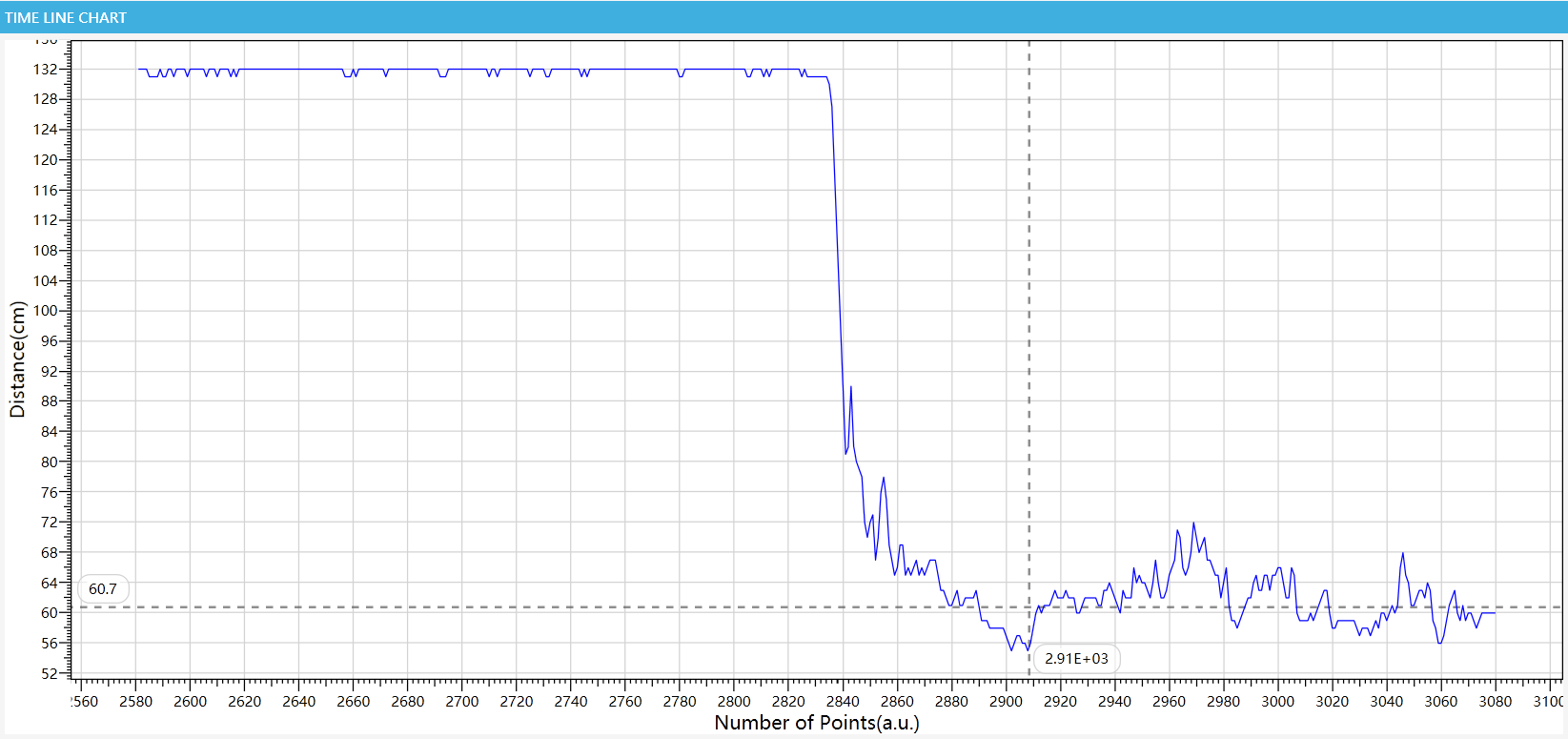
图4 无多次回波测试效果
根据测试结果,开启多次回波后,测量误差显著减小,LiDAR可穿透一定程度水雾。同理,根据多次回波技术获取到的数据,结合特定的滤波算法,激光雷达同样可实现一定程度的雨雪雾霾尘穿透。