

在矿难、地震、洪水等极端灾害的废墟中,复杂地形与高危环境往往成为生命救援的“无形壁垒”。传统救援设备因功能单一、地形适应性差,难以突破塌方、泥沼、高温等复杂场景的桎梏。如今,这一难题被中北大学一支跨学科团队攻克——他们自主研发的“基于ROS操作系统的全地形四组履带搜救机器人”,以颠覆性技术重新定义灾害救援的“黄金72小时”。
这款机器人诞生于国家“机器换人”战略的号召之下。2023年,面对非自然事故频发的严峻挑战,中北大学机械工程学院、机电工程学院、信息与通信工程学院的六名本科生温森博、王彦朝、李亚男、李鑫宇、张文浩、李鹏博在孙连成老师的指导下,开启了一场与时间赛跑的科研攻关。团队深入山西矿区实地调研,目睹矿难救援中人工搜救的局限性与风险,决心打造一款“既能翻山越岭,又能洞悉生命”的智能救援装备。
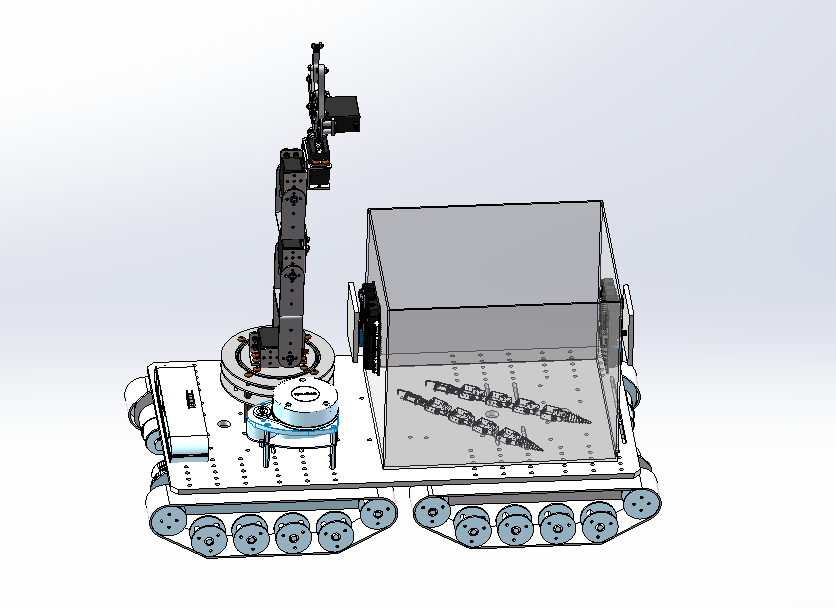
历经数月的跨学科协作,他们成功将“全地形四组履带系统”与“ROS智能操作系统”深度融合,赋予机器人“钢铁之躯”与“智慧大脑”。四组独立驱动的三角型履带单元,如同机器人的“四肢”,每一条履带均可独立调整姿态,通过编码电机与减速机构的高效协同,轻松攀爬30°斜坡、穿越泥泞沼泽,甚至抬升厢体翻越半米高的障碍物。其最大负重达300公斤,牵引附着性能比传统轮式底盘提升40%,接地比压降低50%,在煤矿透水、塌方等极端场景中展现出惊人的通过性。
如果说履带是机器人的“双腿”,ROS(机器人操作系统)则是其“中枢神经”。团队基于Ubuntu系统搭建的ROS开发环境,构建了异构实时控制架构,集成运动学求解、动态路径规划、自主避障与多机协作功能。通过激光雷达SLAM技术,机器人能以每秒2000次的采样频率进行360°扫描,生成厘米级精度的点云地图,并借助改进的SLAM算法优化特征匹配,将定位效率提升30%。即便在浓烟、粉尘或黑暗环境中,它也能像“夜行者”般精准导航。
为穿透废墟捕捉生命信号,机器人顶部搭载了openMV4 Plus3红外热成像模块,可识别0.1℃的体温异常,实现“隔墙见人”的突破。180°旋转云台摄像头与双红外传感器构成“天眼系统”,实时监测火源、温湿度变化,并通过蜂鸣器与LED灯预警潜在危险。更令人惊叹的是,其模块化设计的6关节蛇形机器人,能以蠕动、游动、侧移等姿态深入仅20厘米宽的缝隙,在倒塌建筑内部执行侦察任务。这款“灵蛇”采用低成本高强度材料,重量仅1.5公斤,未来还可扩展至高空清洁、医疗护理等领域,成为跨界救援的“多面手”。
在核生化事故或高温火场中,机器人的稳定性直接关乎救援成败。团队采用FreeRTOS实时操作系统,通过优先级抢占机制实现避障、导航、通信等任务的毫秒级响应,功耗降低20%。STM32F103ZET6主控芯片与Q2MB44MA伺服驱动器的组合,确保设备在-25℃至85℃的极端温度下稳定运行;钢制履带与IP67防护等级外壳,则能抵御粉尘、水渍与机械冲击,堪称“打不垮的钢铁战士”。
实际测试中,这款机器人已展现出颠覆性价值:在模拟矿难场景中,它携带生命探测仪穿越瓦斯泄漏区域,实时回传数据;在地震废墟下,其热成像模块仅用3分钟便锁定受困者位置;面对洪水淹没的街道,它涉水传输高清影像,为救援方案提供关键依据。据统计,其激光SLAM与智能路径规划技术可将搜救响应效率提升40%,72小时黄金救援期内的覆盖面积扩大3倍。

中北大学团队的突破,不仅意味着我国高端救援装备迈入智能化时代,更撬动了产业链升级的杠杆。该机器人的技术框架可迁移至物流仓储、军事侦察、高空作业等领域——例如,其ROS协作算法可用于物流分拣机器人,蛇形模块可改造为排爆设备,全地形底盘则能为极地科考提供运输支持。
“我们研发的不仅是工具,更是对‘科技向善’理念的践行。”团队成员表示。未来,随着5G远程操控、边缘计算与AI视觉的深度融合,这款机器人或将配备更强大的自主决策能力,甚至实现“集群化作战”,在灾害现场构建智能救援网络。
从实验室的图纸到灾害现场的实战,中北大学团队用代码与机械臂书写了“生命至上”的答案。这款全地形四组履带搜救机器人,既是我国应急管理体系现代化的缩影,也是青年学子以创新回应时代需求的典范。当灾难来临,它或许就是那道劈开黑暗的科技之光。
(免责声明:此文内容为本网站刊发或转载企业宣传资讯,仅代表作者个人观点,与本网无关。仅供读者参考,并请自行核实相关内容。)