


车企有必要自研激光雷达吗?
对于这一问题,蔚来汽车给出了肯定回答。
6 月 22 日,蔚来举办了线上沙龙,首次介绍了其旗舰纯电轿车 ET7 所搭载的激光雷达——这同时也是蔚来首次参与研发激光雷达,并将其应用于汽车产品上。
透过这次线上交流会,蔚来分享了其辅助驾驶感知方案的路线选择、技术成果以及首次自研激光雷达背后的故事。
蔚来激光雷达研发初尝试
目前,辅助驾驶感知方案有两大流派,一是以特斯拉为主的纯视觉流派,另一个则是多传感器融合流派。蔚来即是后者。
在马斯克看来,单凭相继摄像头带来的视觉方案(Pure Vision)就足以让汽车良好运作。
蔚来汽车硬件副总裁白剑给出了不同看法,他认,人的眼睛比摄像头更精密,且眼镜和大脑能够瞬间获取深度信息,而摄像头只能够提供部分深度信息,并且距离越远精确度越低。
另外,人眼的焦距是随时可变的,能够做到在全景和瞬间聚焦之间快速切换,而目前的摄像头技术显然难以达到人眼的强大功能。
“如果打一个比方,这就像拿小学六年级的学生跟一个大学生同场竞技”,白剑表示。
由此,蔚来坚定地选择了多传感器融合路线。

从 ET7 搭载的 Aquila 超感系统来看,其配备了 33 个高性能感知硬件,其中包括 1 个1550nm 超远距高精度激光雷达,7 个 800 万像素高清摄像头、4 个 300 万像素高感光环视专用摄像头、1 个增强主驾感知、5 个毫米波雷达、12 个超声波传感器、2 个高精度定位单元和 V2X 车路协同。
其中,唯一一颗激光雷达是蔚来与图达通耗时两年联合研发,蔚来参与包括产品定义、设计等环节,并主导开发了激光雷达的主板。某种意义上,这其实重塑了主机厂和 Tier1 厂商(汽车一级供应商)的关系。
以往,汽车零部件多由 Tier 1 进行开发定义,然后再交给主机厂进行上车布置、测试、验收的全套认证流程。
在蔚来看来,传统合作模式开发周期过长,且主机厂难以对零部件进行深度定制或修改,很难将传感器性能发挥极致。
反之,通过和零部件产商联合开发的“半自研”方式,不仅能够缩短开发周期、提升迭代速度,并且能够主机厂车型在开发阶段就进行量身定做。
ET7 激光雷达性能如何?
在详解 ET7 激光雷达性能之前,需要先了解激光雷达的工作原理。

大多数的激光雷达基本上分为三部分——即发射部分、接收部分以及信号处理和点云生成部分。它的工作原理是激光器发射一束激光,激光碰到障碍物被反射后被接收器接收,通过光速乘以时间再除以 2,从而算出发射器与障碍物的距离。
此次应用在 ET7 的激光雷达采用的是混合固态方案,从官方数据来看,这枚激光雷达采用 1550nm 激光光源,最远探测距离可达 500 米。

另外,该款激光雷达水平视角为 120° ,具备“定睛凝视”能力,可以在 40° 的水平、9.6° 的垂直范围内实现 0.06°H x 0.06°V 分辨率,系统默认开启。
白剑表示,激光雷达有三大关键指标,分别是“看得远、看得清、看得稳”。
其中,看得远不仅在于探测距离,反射率同样十分重要。所谓反射率,即激光束发射之后障碍物的反射指标。据白剑介绍,在反射率同为为 10% 的情况下,蔚来 ET7 激光雷达探测距离可达到 250 米。
“看得清”则是取决于分辨率,分辨率越高,越容易被算法识别,且细节能够识别得更准确。
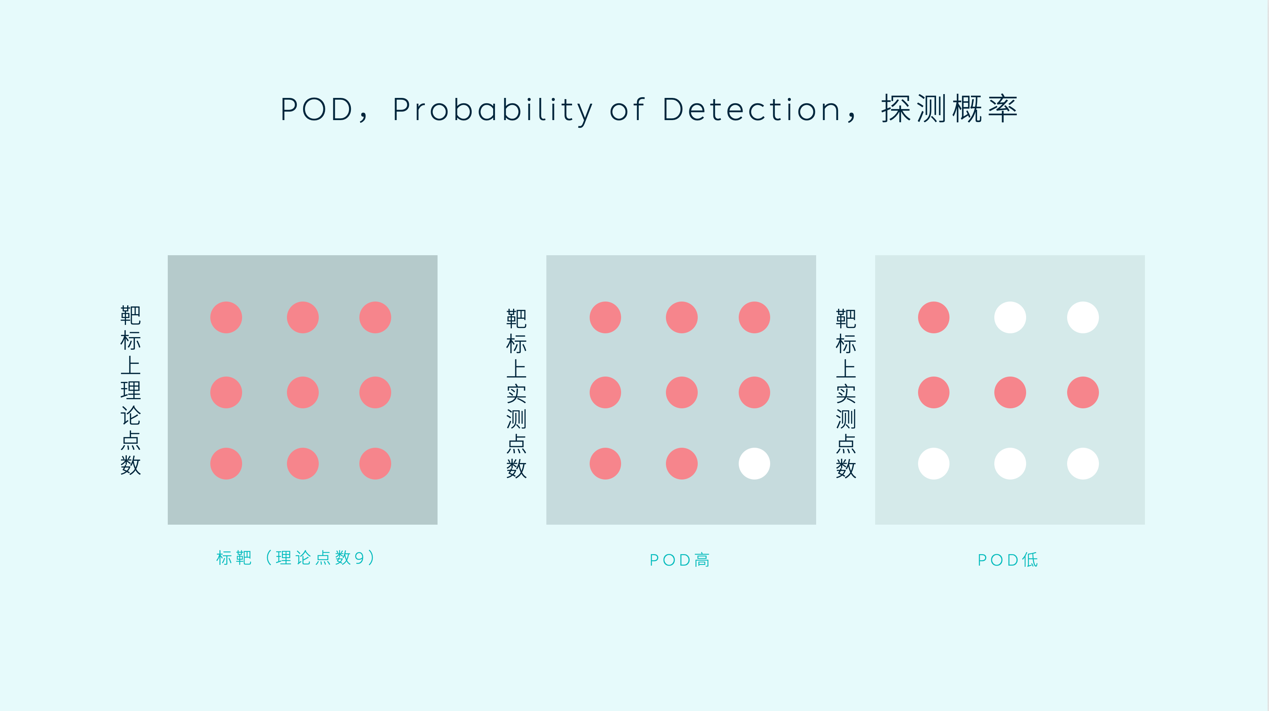
“看得稳”的关键在于 POD (Probability of Detection,探测概率),白剑以购房的建筑面积和使用面积作比喻——假设激光雷达每一帧可以传回十万个点云信息,即建筑面积,但由于能量、接受灵敏度、系统稳定度等因素影响,最终能够被反射回收的点云信息即为使用面积。
POD 越高,稳定性也就越高。据官方数据,ET7 搭载的激光雷达 POD 可以达到 90%。
尽管 Aquila 超感系统只搭载了一颗激光雷达,但白剑认为,激光雷达在车辆正向、高速行驶的情况下更为必要,对于转弯等场景则采用视觉方案进行补盲以保障安全。

另外,为满足车规级要求,实现量产上车,蔚来对激光雷达进行了冲击测试、冷热测试、高温耐久测试、光照测试等。
激光雷达迎来密集上车期
据不完全统计,目前已经公开宣布要搭载激光雷达的量产乘用车已超过 24 款。
蔚小理近期也陆续发布了搭载激光雷达的车型,除了 ET7,最新发布的 ES7 也采用了蔚来和图达通联合开发的激光雷达。另外,近期发布的理想 L9 采用的是禾赛科技 AT128 激光雷达,小鹏 G9 则是采用速腾聚创产品。
可以看到,激光雷达前装量产迎来密集上车期。
随着激光雷达在乘用车应用的普及,其与视觉方案路线的优劣之争也将迎来全新阶段的评比。
究竟是纯视觉方案更胜一筹,还是传感器融合方案更实用,答案还有待时间揭晓。
且让子弹再飞一会。