
今年8月,2024世界机器人大会在北京举办,对比往届,本届大会人形机器人产业地位突出,本届大会共展出 27 款人形机器人本体,为历届之最。
人形机器人及其核心零部件的展位占据了场馆的一半,这标志着人形机器人正逐渐成为机器人行业的中心。

灵巧手作为人形机器人的主要卖点,已经得到行业普遍认可和采用,但在行动方式上面,双足和轮式底盘各有其支持者,甚至一些原本专注于双足人形机器人研发的公司也开始推出轮式底盘的设计方案。
轮式方案以其成本效益、稳定性、续航能力和移动速度等优势而受到青睐,而双足方案则以其在复杂地形上的灵活性和更接近人类的结构设计而备受推崇。

这两种方案各有千秋,自然也催生了结合双足和轮式优点的方案——轮足机器人,这种复合移动机器人兼具高机动性和灵活性。
今天,我们将重点介绍在轮足机器人领域处于第一梯队的国内公司——本末科技。

成立背景
本末科技创始人兼CEO张笛,毕业于香港科技大学ECE机器人学院,师从港科大电子工程系教授李泽湘教授,专注于机器人动力系统与控制方向。
张笛的创业旅程,从理念到商业化,得益于李泽湘教授的指导和支持。

李泽湘教授
李泽湘教授不仅是一位大学教授,同时更是机器人创投界的领军人物。
大疆创始人汪滔、李群自动化创始人石金博、塑巢自动化创始人胡耀清皆出自他门下。自1999年创办中国首家运动控制公司固高科技以来,李泽湘教授与学生们共同创办了大疆创新、李群自动化、逸动科技等知名科技企业。

在当时的机器人整机生产中,上游核心零部件的制造技术是一大挑战,尤其是减速器、伺服电机和控制器这三大核心部件,它们占据了生产成本的60%-70%,这些关键技术的设计与生产长期被日本巨头如纳博特斯克等公司所垄断,国产化率较低。
张笛便萌生了将减速器省掉的想法,这一思路得到了李泽湘教授的支持,并获得了资金援助。
在教授的鼓励下,张笛尝试了新的技术路线,最终开发出了本末科技的直驱电机方案。这种方案摒弃了机械设备中的减速器,直接利用电机为设备提供精准的动力,从而提高了机器人的运动速度和效率,延长了设备的使用寿命,并降低了维护成本。
2019年,本末科技从香港搬到了李泽湘、高秉强和甘洁教授共同领衔的东莞松山湖机器人产业基地(XbotPark)。

在此期间,本末科技得到迅速发展,并凭借其领先的技术解决方案,与家用机器人、工/商用机器人、健身等行业的顶级玩家先后达成了合作。
「识本舍末」,张笛称公司的价值观,就是重视根本,修减微末,找到适合自己的路。

团队构成与专业背景
目前,本末科技已发展到了180余人,团队平均年龄不到30岁。公司研发人员大多数来自香港科技大学、北京理工大学、西安交通大学、浙江大学、湖南大学等国内外高等学府的高学历人才,以及大疆、IBM等知名企业的行业专家。
(1)张笛-联合创始人,CEO
张笛在极客公园创新大会
张笛,本末科技联合创始人、CEO,毕业于香港科技大学,师从李泽湘教授,专注于机器人动力系统与控制方向,参与并领导多项香港特别行政区政府ITF项目,独立设计一款微纳卫星姿态控制器,并交付某航天公司。
(2)刘许洋-联合创始人、副总裁
刘许洋,本末科技联合创始人、副总裁,毕业于香港大学电机电子工程系,深圳市海外高层次人才,曾任职上市公司核心岗位,曾主持HKU ITF Fund、深圳创新圈D类等技术攻关项目,曾获全国大学生电子设计一等奖。
(3)郁亚南-联合创始人、CTO
郁亚南,本末科技联合创始人、CTO。博士毕业于西安交通大学,电机设计方向,在电机设计领域有十余年经验,曾任职于洛轴、广东伊莱斯电机有限公司电机设计副经理、航空某所、林泉电机等知名企业。
(4)朱志龙-联合创始人、CPO
朱志龙,本末科技联合创始人、CPO。曾就职于深圳大疆创新,跟进数款永磁电机从设计到打样生产全过程,共获得二十余项国家专利。

主要业务
目前,本末科技拥有核心零部件及机器人两大业务场景。
在核心零部件业务上,其具备从传感器、驱动器到电机本体的全套研发设计生产技术。
在产品上,其以直驱技术为基础,针对家用机器人、工/商用机器人、健身行业,成功构建了三大产品线,同时可为客户提供从需求定制、方案设计、调试维护的全套解决方案。
在机器人业务上,本末科技通过直驱型关节和轮毂电机驱动技术自主研发的两款双轮足机器人刑天和TITA,目前主要客户以高校为主。
(1)核心零部件业务
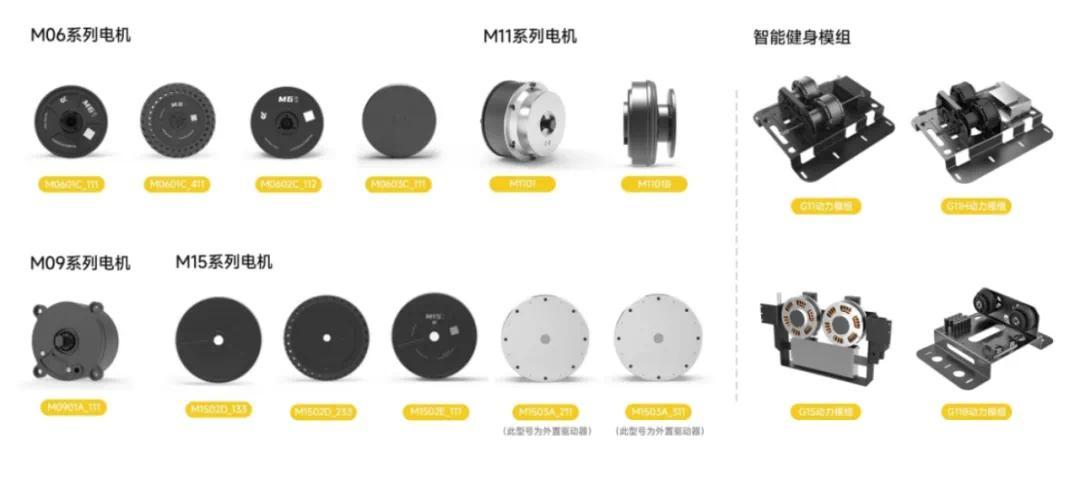
本末科技M6、M9、M15和M11系列电机,分别面向家用机器人、工/商用领域机器人、智能健身器材等领域。
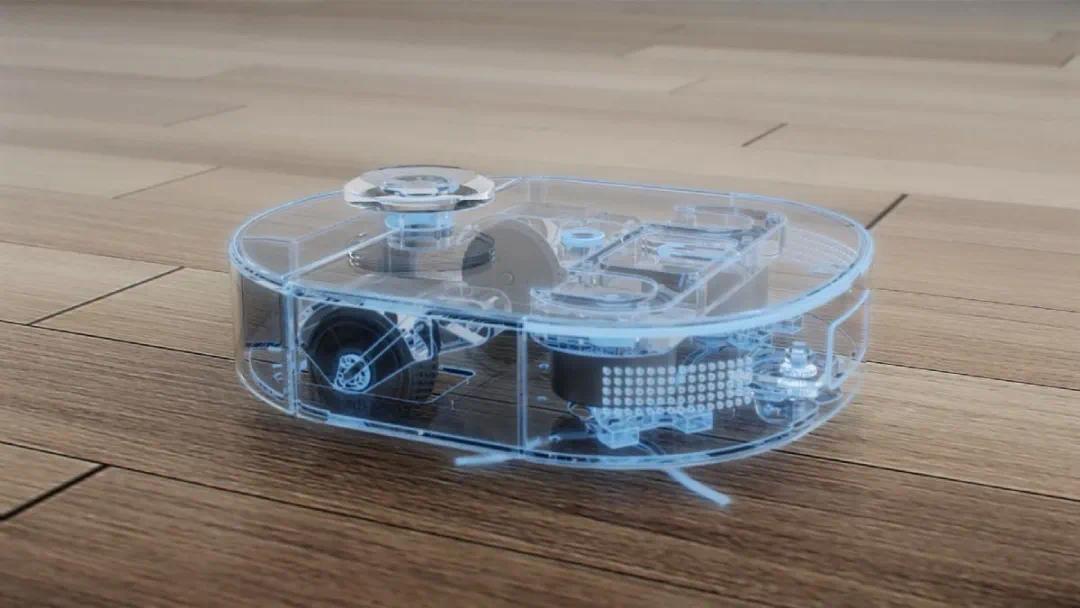
以扫地机器人为例,电机和驱动一体化设计,可以节省产品内部近一半的空间,更有利于内部硬件集成,还可以做到极致静音,没有减速器齿轮磨损,设备寿命可轻松提升数倍。
M06系列电机
直驱方案一定程度上解决了协作机器人行业内长期存在的高成本难题,其总体成本相较于传统的电机+减速器方案,价格降幅达到 50%-60%,为客户赋能并进一步推进协作机器人行业的快速发展。
(2)双轮足机器人业务
本末科技自研自产两款自平衡轮足式机器人:刑天机器人和TITA机器人。
本末科技的双轮足机器人,结合双足和轮式的优点,以伸缩腿搭配轮子,去掉减速器,依靠六个直驱型关节运行,轻便灵活,会弹跳、侧蹲。
今年初,本末科技成立了机器人事业部,在通用具身智能机器人方向的持续深耕,针对危险、紧急和重复性任务推出智能机器人检测解决方案,为系统建设、运维等工作提供高效保障,并面向通用类机器人业务寻求更高发展空间。
a)刑天机器人
2020年,本末科技研发并发布了首款搭配直驱电机的双轮足机器人——刑天,并将其打造成为国内首个轮足机器人开发平台,开启了机器人(直驱)关节形态领域的新时代。
刑天是一款直驱敏捷双轮足机器人,亦是一个开放的开发平台。
机器人全身由 6 个可以自由运动的 M1502D直驱型机器人关节驱动,动力澎湃、动作丝滑、节电高效。

与传统的减速器方案不同,刑天在运行过程中极致安静,不会带来任何噪音困扰。

这款机器人将轮式 AGV 的速度优势和足式机器人的机动越障性能结合,以及独特的变形功能让机器人兼顾足式机器人的灵巧与轮式机器人的稳健迅捷,可以使其在多地形下高效、灵活地运动。
刑天机器人通过模块化结构及开放式接口,可搭载视觉模块、通讯模块、AI 主机、边缘处理器和各种传感器,被应用于智慧园区、矿山及各种复杂的工业环境中执行高效率巡检,负载运输、数据采集、扫描测绘等任务。同时也被各高校、研究院等机构广泛应用在教学、科研以及竞赛中。
在刑天机器人的吸引下,商汤科技、紫川等科技企业与MIT、伯克利等知名高校,已成为本末科技的主要客户。
b)TITA机器人
2023年5月,在伦敦举办的ICRA 2023上,本末科技发布了TITA机器人。
TITA机器人是一款具备高度感知力和决策力的轮足机器人,全身拥有8个自由度,具备出色的抗摔性能、强大的自我恢复能力、即时响应能力,以适应各种复杂地形下的高效运动。

另外TITA机器人内置多个相机与传感器等,具备拟人感知力和自主决策能力,可完成复杂路面的自主导航、自动越障与绕障、空间定位、深度测量、视觉感知等,并搭建完整通信系统,可完成集群协作。

TITA顶部配备通用导轨,使配件可以快速模块化拆装,叠加内置扬声器,以满足个性化场景需求。同时支持各种模式下的二次开发,可以通过RPC或机载编程完成任意级别操作,包含行为级和关节级操作,为用户提供了更大的自由度。
针对不同行业和场景需求,公司推出了多款TITA机器人技术方案落地。
如面向运控算法学习和基础移动开发平台市场需求的运控开发版本、面向复杂工业环境应用的具身智能开发版、面向高校/科研院所、物流等场景应用的四足/四轮足机器人版本等等。同时在TITA机器人配套方面,通过电池热插拔设计搭配换电站,实现24小时不间断续航,通过TITA Tower并实现机器人360°平面视野。

估值及融资情况
本末科技目前完成5轮融资,融资金额过亿元,最新估值为投后12亿元。
天使轮融资:2020年11月,本末科技完成天使轮融资,金额为数百万人民币,投资者包括清水湾资本、奇绩创坛、松山湖国际机器人研究院(李泽湘教授)。
Pre-A轮融资:2021年5月,本末科技完成Pre-A轮融资,金额为数千万人民币,估值达数亿元,由五源资本领投,老股东奇绩创坛、大米创投跟投。
A轮融资:2022年10月,本末科技完成A轮融资,金额为近亿元,由松禾资本和联想创投联合领投,某知名产业投资方和毅峰资本跟投,五源资本和奇绩创坛等老股东增资。
A+轮融资:2023年9月,本末科技完成A+轮融资,金额为数千万元,由立湾资本领投,建元投资跟投。
Pre-B轮融资:2024年3月,本末科技完成Pre-B轮融资,金额为1亿元,投后估值12亿元(IT桔子数据),由北京国管旗下顺禧基金和亦庄创投联合领投,老股东联想创投跟投。

小结
虽然人形机器人目前是机器人领域的热门趋势,但这并不意味着所有企业都必须投身于人形机器人整机的研发。可以看到,机器人核心零部件及非人形机器人同样拥有着发展空间。
此外,像本末科技在直驱电机和轮足机器人技术方面的发展,显然为机器人技术的多样性和实用性提供了相应的价值。其直驱双轮足方案,也为机器人的移动模式提供新的方向。