


Bionic Robot
仿生海洋机器人


人类对海洋的探索从未间断过,随着探索的逐步深入,受深海中潜藏的危险以及人体机能上限等因素的限制,人类已无法完全靠自身完成更多的探索任务了。在这种情况下,海洋机器人应运而生。
仿生海洋机器人&传统海洋机器人
海洋机器人也被称为水下机器人、遥控无人潜水器,主要用于代替人类进入海洋更深的区域进行探索,从20世纪60年代开始至今,逐渐成为探索海洋的重要工具。海洋机器人在多个领域都发挥了很高的应用价值,比如在海洋科考方面,可完成包括海洋勘探、水质监测、生物研究、海洋测绘等任务;在水下作业方面,可完成包括海底管道检测、大坝巡检等保障任务;在军事方面,可用于海上战场抵近侦察、目标搜救、战场监视及海域反潜巡航打击等任务。根据外形,海洋机器人可分为传统海洋机器人和仿生海洋机器人两种。
常用的传统海洋机器人包括缆控海洋机器人和无缆遥控海洋机器人,绝大多数采用螺旋桨作为动力来源,这种驱动方式易被水草沙石干扰,且功耗大、效率低、噪声大、不够灵活,对海洋生物也极不友好。
仿生海洋机器人则弥补了传统海洋机器人的劣势,其设计多以鱼类为原型。鱼类作为自然界中最早出现的脊椎动物,经过几亿年的自然选择,进化出了非凡的水中运动能力,其推进方式和效率远高于人类现有的航海科技。仿生海洋机器人将鱼类的推进机理和机器人技术充分融合,大大提升了海洋探索的效率。
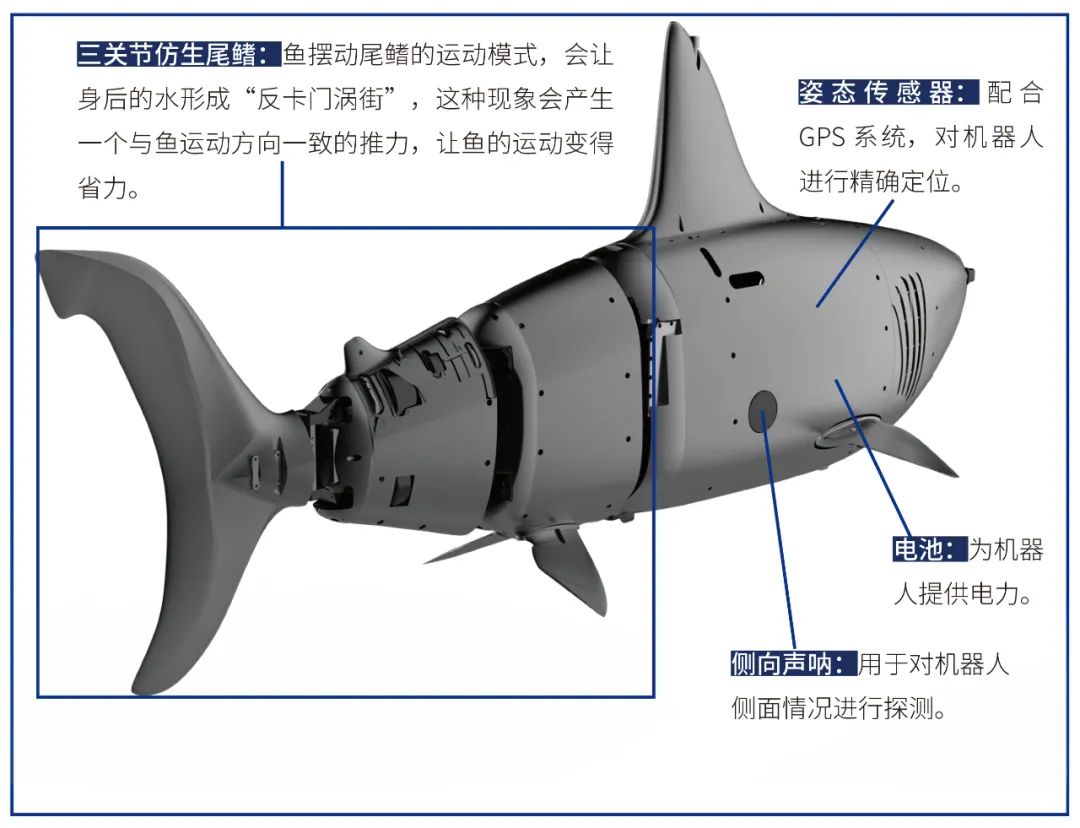
解构仿生鲨鱼机器人
我们今天要介绍的仿生鲨鱼机器人RoboShark,以仿生尾鳍作为唯一动力源,推进效率高达80%,较传统螺旋桨推进方式,可以很大程度提高续航时间。同时,RoboShark模拟鲨鱼的外形与游动方式,对海洋环境十分友好,且噪声低、对环境扰动小,结合吸音材料外壳,几乎不干扰水体环境。甚至,海洋生物有可能会将仿生鲨鱼当成真实鲨鱼一样对待。
RoboShark曾在山东省青岛市附近海域执行水文信息采集任务,勘测人员使用它在港口周边海域进行勘测,获取水中画面、水温及流体信息等。同时,利用RoboShark的侧向声呐,完成对码头结构的成像及分析。
接下来,我们就一起来看看,这只“鲨鱼”身上有哪些奥秘。



知识链接
“卡门涡街”理论是著名科学家冯•卡门提出的,他发现水流在经过圆柱体的时候,如果速度足够快,水流的流动方向就不再是竖直向后的了,而是形成两排漩涡,两排漩涡之间的部分便叫作涡街。这两排漩涡会对运动的物体产生阻力。而鱼摆动尾鳍的运动模式,会让身后的水形成“反卡门涡街”,产生对鱼的推力,鱼游动时就会很省力。机器人在设计时参照了这一运动模式,大大提升了机器人的推进效率。
作者/叶芳