
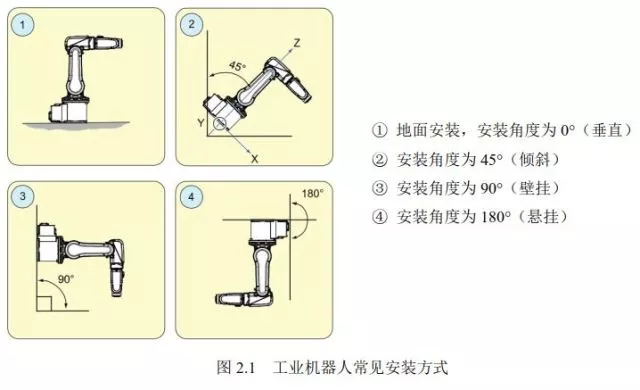
常见的工业机器人安装方式有4 种,如图2.1 所示。IRB 120 机器人本体支持各种角度的安装,在非地面安装时需要设置相关参数以优化机器人运动最佳性能。

本体接口
IRB 120 机器人本体基座上包含动力电缆接口、编码器电缆接口,4 路集成气源接口和10 路集成信号接口,如图2.2 所示。

控制器面板
IRB 120 机器人采用的是 IRC5 型紧凑型控制器,其面板布局分为按钮面板、电缆接口面板、电源接口面板3 部分,如图2.4 所示。

面板各部分功能介绍见表2.1。

操作步骤
IBR 120 机器人安装的操作步骤见表 2.2。


本文为海渡学院原创,如需转载,请注明出处。