

编译 | 健恩
编辑 | 高歌
智东西8月18日消息,你以为跑酷只是人类专长?那你就错了!波士顿动力受人类行为启发,让类人机器人也能跑酷!旋转、跳跃、后空翻都不在话下,一分多钟就能跑完一场“障碍赛”。
昨天,波士顿动力在其官网的博客上宣布,他们的两台Atlas机器人首次完美地完成了复杂的障碍赛。同时,他们还发布了一条1分05秒的视频,展示了Atlas超凡的“跑酷”能力。

▲在跑酷的机器人
视频中,一个机器人在一系列倾斜的胶合板上反复跳跃,随后跃上另一个平台,在搭出来的台阶上跑上跑下。紧接着,第二个机器人跳上平衡木并反向完成了第一个机器人进行过的步骤。之后第一个机器人一个翻身跳过平衡木,与第二个机器人一起以两个同步的后空翻完成了整个过程。
据该团队成员所说,机器人完成整个连续的过程花费了大约90秒的时间。

▲两个机器人同步后空翻
一、工程师们死磕细节,让机器人跑酷变为现实
这次演示看似完美,但是工程师们并不满意:“在今天之前,我们没有进行过后空翻的尝试,所以这次只是一个试验。如果你仔细看视频的话,会发现它看起来实际上有点尴尬。我们将继续优化我们测试过的动作,并且有信心能让它变得更好。”
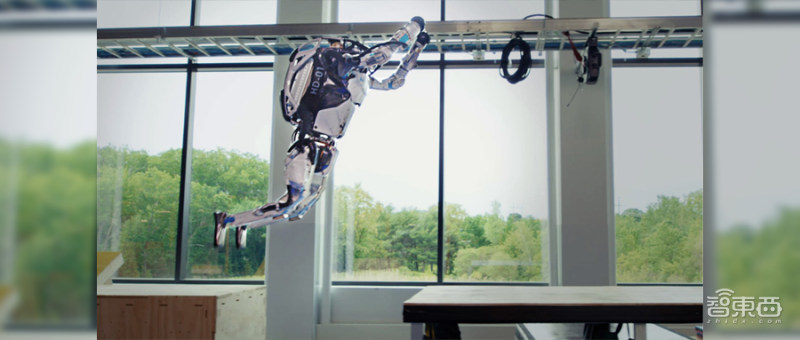
机器人跑酷的过程中抽动了一下手臂,这个简单的动作差点让它摔倒。这只是非常轻微的一个失误,大多数观众都不会注意到。但是这个细节还是被Atlas团队注意到了,他们称想要把它做到最好。

▲机器人单手支撑身体越过横梁时手臂发生抖动
正是他们对细节的如此关注,才能让一个相当科幻的、充满未来感的、甚至看似不可能的机器人出现在人们眼前。
Atlas只是一个研究平台,并非一个商业产品,机器人会后空翻的能力在商业环境中似乎是没什么用处的。但是我们可以想象得到,如果机器人最终能够与普通成年人一样拥有相当灵巧的身体,并且能够对环境作出反应,那么它潜在的应用范围将是无限的。
Atlas团队负责人Scott Kuindersma说:“从几个角度看,类人机器人很有趣。首先,它让我们对未来无所不能的机器人的想象在一定程度上变成了现实,他们可能不是某些特定任务的最佳设计,但是如果你想创造一个可以执行各种物理任务的平台,我们起码知道人类外形可以做到这一点。”
“从技术的角度看,类人机器人给我们的研究团队提出了挑战。他们的尺寸和复杂性需要与强度重量比、运行时间、运动范围以及各类硬件设计等相权衡。同时,我们的控制团队必须创建相应的算法来控制这些机器,以协调各种行为。最终,像Atlas这样的类人机器人不断的推动机器人的极限来推动硬件和软件创新,并且创新成果将最终转化到我们波士顿动力所有的机器人上。”Scott Kuindersma补充道。
跑酷虽然是一项小众的运动,但是它为Atlas团队提供了一个完美的试验方式来检验机器人的动作。这是一项全身活动,需要Atlas在不同情况下保持平衡,并在一种动作和另一种动作之间无缝切换。
Scott Kuindersma说:“这实际上是机器人在能力极限下的行为,他们的各部分都在一个灵活的控制系统中协同工作。跑酷不会帮你解决掉所有问题,我们也不会尝试去一下子解决所有问题,我们现在所做的工作给我们解决下一组研究问题奠定了坚实的基础。”

▲机器人平稳地跑过平衡木
二、机器人能感知环境调整行动,无需提前编写程序
回顾过去五年间Atlas的视频,人们很容易忽略该团队在这段时间内取得的进步。事实上,他们做出的一些改变对于普通观众来说是无法感知的,尽管其中的一些进步代表了技术的巨大飞跃。
比如,Atlas在早期的视频中就已经能实现俯卧撑、倒立和后空翻,但是控制这些动作的基本过程已经发生了很大的变化。
Scott Kuindersma解释道:“现在,Atlas的行动是由感知驱动的,而在这之前并非如此。例如之前的舞蹈视频是在展示我们捕捉各种动态动作的能力,需要将这些捕捉到的动作连成一个我们可以一遍又一遍运行的连续动作。在这种情况下,尽管机器人的控制系统仍需要进行大量关键调整,以保持机器人的平衡和姿势,但是他们并没有感知环境并对环境作出反应。”

▲波士顿动力会跳舞的机器人
在实现跑酷的这次迭代中,机器人需要根据它们看到的内容调整其行动。这意味着工程师不需要为机器人可能遇到的情况而事先编写程序。Atlas团队只创建了较少数量的模板行为,这些行为可以与环境相匹配,并且让机器人快速执行。
“我们决定在开发过程的后期添加一个倾斜转弯的动作。我们能够利用为其他环境中创建慢跑动作而开发的工具来快速创建一个原型,并使用模拟器和机器人实际测试对其进行修正和改进。”
仿真模拟是Atlas控制团队必不可少的开发环节,既可以用在机器人测试之前评估其新动作,也可以保证新的软件系统不会对现有功能产生负面影响。但是仍然没有有效的硬件测试的替代品,尤其是像跳马这类运动。
跑酷中的跳马并不像体操比赛中那样花哨,只需要跑酷者越过矮墙或者障碍物。让机器跳马也一样,只需将手臂放在横梁上,然后翻过只有几英尺高的平衡木。对于人来说,这种动作可能非常容易,但是对于Atlas团队来说,这是一项艰巨的挑战。
“如果你要我跳过障碍物,我会利用我们身体的某些特性来实现,但是这些特性并不能利用到机器人身上。比如,机器人没有脊椎或者肩胛骨,同时它们还有一个沉重的躯干和相对较弱的手臂关节,所以它们的运动方式与人类不同。因此,在各种限制范围内找到有效的解决方案是一项非常有趣的挑战。”Scott Kuindersma说。
三、机器人跑酷并非一帆风顺,一半时间都会摔倒
在拍摄过程中,Atlas有大约一半的时间正确地完成了需要进行的动作。而剩下的其他过程中,它们往往越过障碍物后就会失去平衡倒下。工程师们不断地查看机器人的日志以寻找调整的方法。
Atlas控制负责人Ben Stephens说:“机器人做到了很多令人兴奋的动作,尽管其中一些还不完全可靠。这大约90秒的连续跳跃、慢跑、转弯、后空翻等动作中的每一个动作都有失败的可能,因此失败的概率加起来是相当高的。”

▲机器人在跑酷过程中摔倒
Ben Stephens还补充道,这是波士顿动力第一次拍摄两个机器人一起表演跑酷。“直到两周前,我们才真正把这两个机器人放到一起。我们认为我们已经发现了所有主要的问题,现在能做的就是不断修正可能出现的小概率问题。”他说。
“我们正在解决的是非常困难的问题,随之而来的必定是不可避免的挫折,我认为这是机器人技术的乐趣之一。”Scott Kuindersma说道,“二十年后的世界里可能会出现优雅的、可靠的、与人类一起工作的强大的机器人来丰富我们的生活,但是现在我们仍处于创造未来的早期阶段。”
结语:机器人跑酷并非易事,技术有助于更多机器人进步
具有人类外观的类人机器人一直是科幻电影中经久不衰的话题,另外由于类人机器人能够像人一样活动,在实际生活中也有着较为广泛的应用潜力。然而由于人体结构的复杂性,想要让机器人完美实现人类的各种行为尚不现实。
跑酷是一项对人体综合素质要求极高的运动,跑酷者不仅要有灵活的身体,还要有出色的身体协调能力,想让机器人学会跑酷更是难上加难。
而波士顿动力让机器人跑酷变为了现实,并且这种机器人还可以自主感知环境并行动,而无需提前编写相应的程序,这对于机器人技术来说是一项了不起的进步。不过,Atlas并非一个商业产品,其本身带有更多的研究性质,我们可能暂时不会在市面上见到跑酷机器人。
但波士顿动力称,由Atlas带来的硬件和软件创新将会逐渐的应用到波士顿动力的其他机器人身上,让我们有机会从其他机器人身上感受到这些技术带来的进步。